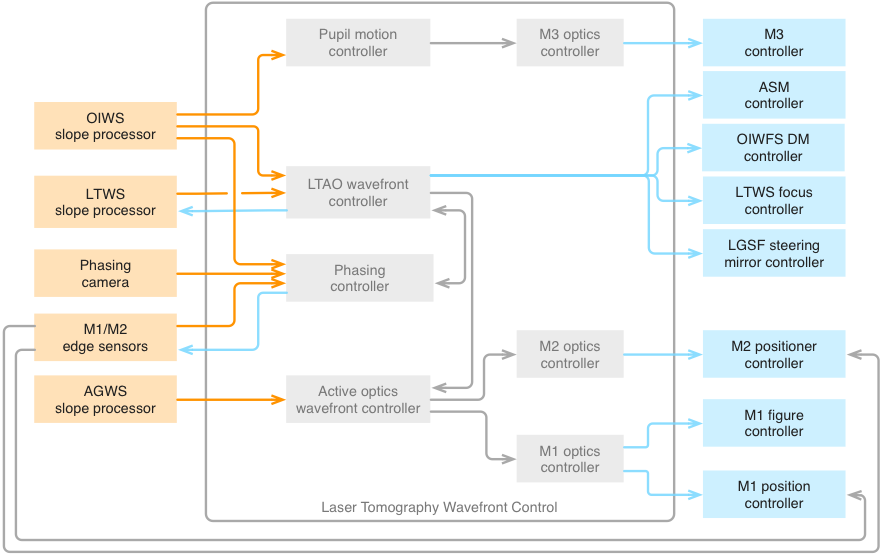
A simplified block diagram of the LTAO WFC is presented in Figure 5.14. There are strong similarities to the NGSAO WFC, with
the LTWS taking the place of the NGWS. The LTAO Wavefront Controller has three
additional outputs controlling the OIWFS DM, the LTWS focus stage, and the LGSS
steering mirrors. At this level of detail, the additional NGS tip-tilt and
focus control loops and the details of the pseudo open-loop tomographic control
are hidden within the LTAO Wavefront Controller. The Phasing Controller in the
LTAO mode has additional inputs from the OIWFS, Phasing Camera, and M1 and M2
Edge Sensors. The operation of the Active Optics Wavefront Controller is
identical to the NGSAO mode.
Fig. 5.14 LTAO wavefront control system simplified block diagram#
Thirteen wavefront control loops operate simultaneously in the LTAO mode, a
number similar to that of present-generation state-of-the art AO system (e.g.,
Gemini GEMS). Eight are implemented by the LTAO Wavefront Controller based on
measurements made by the LTWS and OIWFS. These are:
High-order on-axis wavefront error, compensated with the ASM
High-order off-axis wavefront error, compensated with the OIWFS DM
Tip-tilt, compensated with the ASM
Focus, compensated with the ASM
Dynamic calibration, compensated with the ASM
OIWFS dynamic calibration, compensated with the OIWFS DM
Laser tip-tilt, compensated with LGSS steering mirrors
Laser focus, used to optimize the axial position of the LTWS.
The remaining five control loops are:
The M1 and M2 Edge Sensors, which control the relative positions of the M1
and M2 outer segments with respect to the center segments.
The Phasing Controller, which updates the M1 edge sensor setpoints based on
OIWFS and/or Phasing Camera measurements.
The Phasing Controller, which feeds forward edge sensor segment piston
measurements to the ASM via the LTAO Wavefront Controller.
The Active Optics Wavefront Controller, which controls field-dependent
aberrations based on AGWS measurements.
The Pupil Motion Controller, which adjusts the tilt of M3 to maintain the
pupil centered on the instrument.
This list does not include control loops internal to AO subsystems, such as the
tip-tilt dithering on the IOPS sensor of the OIWFS. As in the NGSAO mode, there
are also many offloads between controllers, some of which are described in the
next section.
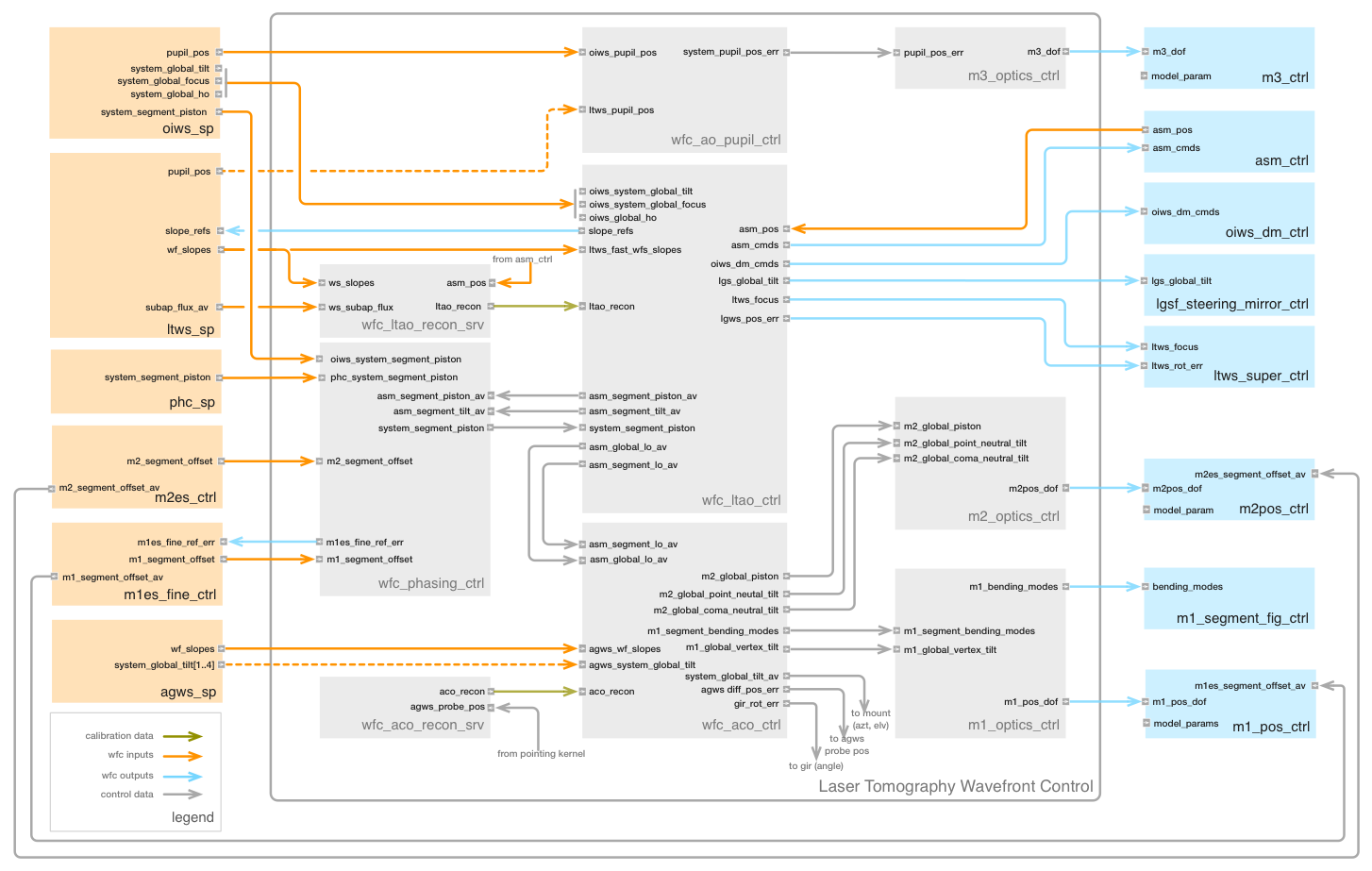
Component Descriptions
Figure 5.15 is a more detailed
block diagram of the LTAO WFC, with all of the real-time components
currently envisioned. A list of the components is provided in Table 10-27
[TBA]. A description of the most critical components is given below,
followed by an identification of the connections between them.
Table 5.20 LTAO Wavefront Control System Components#
Component Name
Description
Software Package
wfc_ltao_ctrl
LTAO Wavefront Controller
wfc_ltao_pkg
wfc_aco_ctrl
Active Optics Controller
wfc_common_pkg
wfc_ao_pupil_ctrl
AO Pupil Motion Controller
wfc_common_pkg
wfc_phasing_ctrl
AO Phasing Controller
wfc_common_pkg
wfc_ltao_recon_srv
LTAO Reconstructor Server
wfc_ltao_pkg
wfc_aco_recon_srv
Active Optics Reconstructor Server
wfc_common_pkg
m1_optics_ctrl
M1 Optics Controller
wfc_common_pkg
m2_optics_ctrl
M2 Optics Controller
wfc_common_pkg
m3_optics_ctrl
M3 Optics Controller
wfc_common_pkg
Fig. 5.15 LTAO wavefront control system detailed block diagram#
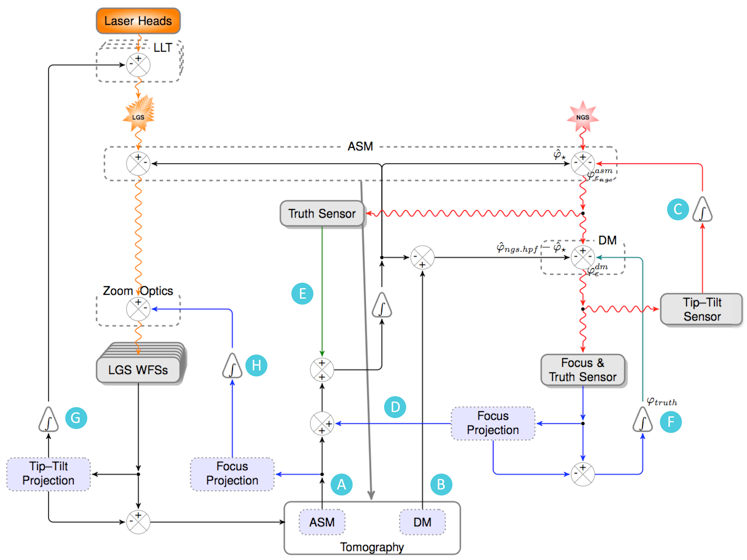
LTAO Wavefront Controller
The LTAO Wavefront Controller (wfc_ltao_ctrl), shown in the Figure below,
implements LTAO control loops A through H. It receives input from the LTWS Slope
Processor (ltws_sp), the OIWFS Slope Processor (oiws_sp), and the Phasing
Controller (wfc_phasing_ctrl). The most complex function of this component is
the tomographic reconstruction of the on- and off-axis wavefront error from the
LTWS measurements (loops A and B), described in detail in Section 8.8.2
[Bouc13b].
Fig. 5.16 LTAO wavefront controller block diagram (input from the phasing
controller and active optics controller are not shown). Control loops
A-H are identified.#
The other six control loops are comparatively simple:
Tip-tilt is measured by the OIWFS, and added to ASM command vector at
the rate at which it is measured, generally asynchronously with the
tomographic reconstruction.
Focus is measured by the OIWFS at ~10 Hz, summed with high-pass
filtered on-axis tomographic focus (>10 Hz), and added to the ASM
command vector.
The main dynamic calibration loop subtracts the aberrations measured by
the Truth Sensor of the OIWFS from the ASM command vector, to correct
any low-order aberrations in the science focal plane (see Figure
10-30).
A secondary dynamic calibration loop uses the Focus and Truth Sensor
downstream of the OIWFS DM to remove any residual low-order aberrations
from that DM.
Laser tip-tilt is measured by the LTWS and used to update the LGSS fast
steering mirror positions.
Laser focus is derived from the tomographic reconstruction on-axis, and
used to drive the LTWS focus stage at 10 Hz.
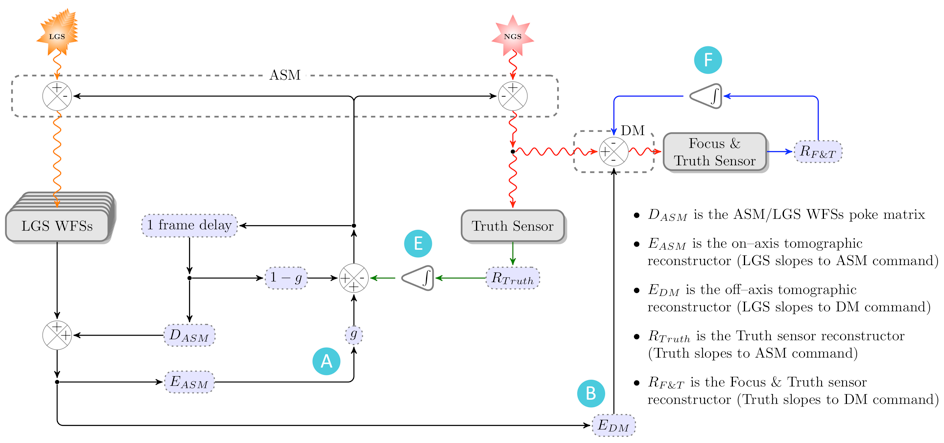
Fig. 5.17 Detail of the LTAO dynamic calibration control loops#
The other key inputs to the wfc_ltao_ctrl component are the segment piston
error fed forward by the Phasing Controller from the M1 and M2 edge sensors,
and field-dependent aberration compensation from the Active Optics Wavefront
Controller. Both of these are added to the ASM command vector before it is
sent to the ASM Controller.
In order to implement pseudo open-loop control, the wfc_ltao_ctrl component
must also be given the actuator position after the previous step by the ASM.
Commands sent to the ASM are then in terms of absolute actuator position.
The slow offloads from the wfc_ltao_ctrl component are identical to those
in the NGSAO mode. The input and output ports of the wfc_ltao_ctrl
component are listed in Table 10-28 [TBA].
Active Optics Wavefront Controller (LTAO mode)
The Active Optics Wavefront Controller is identical in the LTAO mode as in
the NGSAO mode.
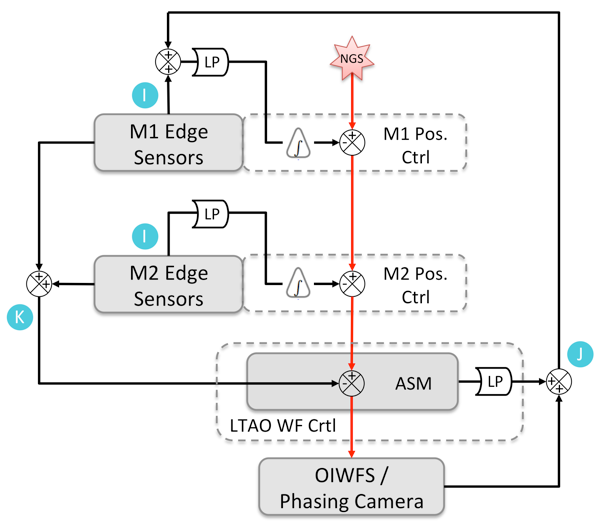
AO Phasing Controller (LTAO Mode)
The Phasing Controller (wfc_phasing_ctrl) in the LTAO mode provides
updates to the M1 edge sensor control points, and feeds forward the sum of
the M1 and M2 reconstructed segment piston to the LTAO Wavefront Controller.
These control loops are illustrated in Figure
5.18. The LTAO functions are a superset of the
NGSAO functions, so they have been designed as a single component, using a
different set of ports in each mode. These are identified in Table 10-26
[TBA].
As in the NGSAO mode, the relative position and tilt of the M1 and M2
segments is controlled at low bandwidth (<1 Hz) by the M1 and M2 edge
sensors in closed loop with the M1 and M2 segment positioners. Any slow
drift in the M1 edge sensors will be observed as a segment piston error with
the OIWFS (every 1-10 s) or the Phasing Camera (every 30-60 s). The measured
segment piston is added to the time-average segment piston and tilt on the
ASM actuators. In theory the ASM segment piston should be zero-mean, but it
does not hurt to include this “escape valve” for any piston which builds up
there. The M1 edge sensor setpoints will be updated after every OIWFS or
phasing camera measurement (with a modest integrator gain g < 0.5) to
maintain zero average system segment piston.
The wfc_phasing_ctrl component will also sum the M1 and M2 edge sensor
measurements, and feed forward the segment piston component to the LTAO
Wavefront Controller at 500 Hz. This allows the ASM to compensate for wind
disturbances or vibrations at up to ~70 Hz.
Fig. 5.18 LTAO Phasing Controller Block Diagram. Other software components are
shown with dashed lines. Control loops I-K are identified.#
LTAO Reconstructor Server
The LTAO Reconstructor Server (wfc_ltao_recon_srv) is another key component
in this mode. Its relationship to other components is illustrated in Figure
Figure 5.14.
The LTAO wavefront reconstructor matrices A and B (see Section 8.8.2.3
[Bouc13b]) depend on the atmosphere parameters: r0, L0 and the Cn2 profile.
The values of these parameters evolve with time so the matrices must be
recomputed every ~60 s. The r0 is a scaling factor and does not require a
new computation of the matrices, but changes in Cn2 and the L0 do.
Both r0 and L0 can be derived from the statistical moments of the
pseudo-open loop slopes. Full frame rate, pseudo-open loop slope vectors
must be used. Tip-tilt and focus will be removed from the slopes before
computing their variance, covariance, and structure function. Model fitting
to the statistical moments will lead to the estimates of the r0 and L0. The
Cn2 profile will be derived with a SLODAR-like method [Wils02] using the
cross-correlation of the tip-tilt and focus filtered pseudo-open loop slopes
between the different LTWS cameras.
Reconstructor matrices A and B are computed by matrix inversion using these
atmospheric parameters. This requires significant computing power, similar
to that necessary for the real-time tomography (see Section 8.8.4 [Bouc13b]).
The wfc_ltao_recon_srv component must also update the noise covariance
matrix. This matrix depends on the read-out noise, the total flux per
subaperture, and the LGS spot elongation. The maximum intensity per
subaperture is a good indicator of the spot elongation and it will be used
to discard subapertures on the fly when its flux falls below a threshold.
The input and output ports of the wfc_ltao_recon_srv component are listed in
Table 10-29 [TBA].
Simulations
As for the NGSAO mode, no complete simulations of the LTAO wavefront control
system with all of the control loops presented in this section have yet been
performed. However, the following simulations demonstrate critical aspects
of the control system:
The LTAO end-to-end performance simulations described in Section 8.9.2
include tomographic control of both the ASM and OIWFS DM, and NGS
tip-tilt (Loops A, B, C).
Additional simulations reported in the LTAO System Design Manual31
include the Focus and Dynamic Calibration control loops (D and E).
Phasing simulations described below include all of the segment piston
control loops (I, J, and K).
Active Optics Wavefront Controller simulations are described in Section
6.12.2.5 [John13].
The laser feedback control loops (G and H) have been investigated
analytically in Section 4.7.4.1 of the LTAO System Design Manual [ANU13].
LTAO Phasing Simulation
A numerical simulation of the LTAO mode Phasing Controller was run to verify
the performance of the control loops illustrated in Figure
5.19. The parameters used in the simulation are
summarized in Table 10-30 [TBA]. They are based on the requirements of the
various sensor and actuators in the control system, rather than the
as-designed performance.
The simulation includes estimates of the mechanical and thermal drifts of
the M1 and ASM Reference Body (RB) segments, the measurement error and
sampling rates of all sensors, and the finite precision and slew time of the
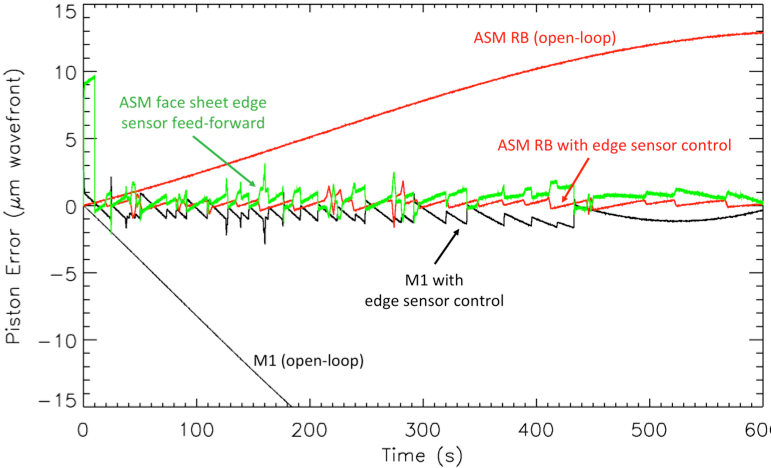
actuators. A typical time history of a single M1-M2 segment pair is shown in
Figure 5.20. The simulation tracks the
positions of the segments and the measurements made by all sensors with a
time step of 1 ms.
If uncorrected, M1 and the ASM reference body are each expected to drift in
piston by up to 250 nm/min (wavefront). Closed-loop control of the M1 and M2
positioners by the edge sensor system (Loop I) keeps the segments aligned to
within ~1 μm. The residual piston error feed-forward loop (Loop K) causes
the ASM face sheet to closely track the negative of the sum of the M1 and
ASM reference body error. The sum of these three components (M1, ASM RB, and
ASM face sheet) is close to zero, but includes various error contributions
as well as flexure and thermal drift of the M1 edge sensors (~3 nm/min). In
this simulation, the slow drifts are corrected by OIWFS measurements every
10 s (Loop J).
Fig. 5.19 Phasing simulation, showing a typical time-history of one segment pair
over 10 minutes. The sum of the piston error due to M1, the ASM
reference body (RB) and the ASM face sheet is the total piston error.#
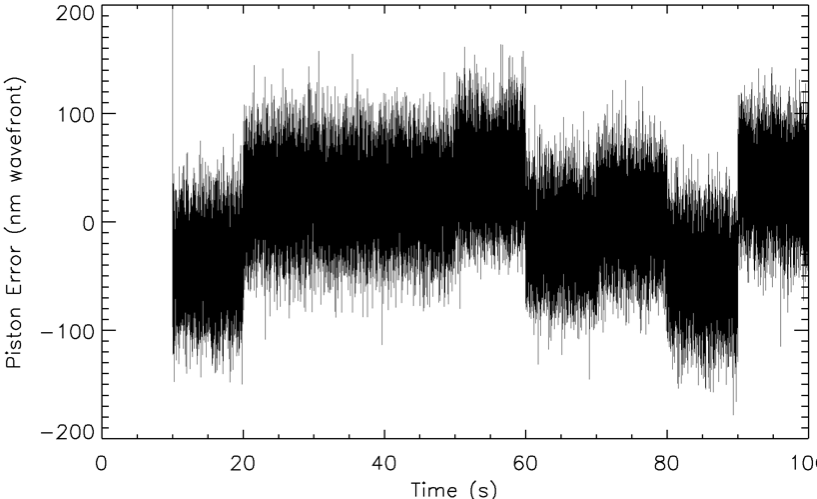
The total piston error for this one segment over the first 100 s of the
simulation is illustrated in Figure 10-33. The high-frequency jitter due
primarily to edge sensor measurement error is clearly seen, as are the
updates from the OIWFS every 10 s. The piston error over the full 900 s,
once the initial transient is corrected, is 50.4 nm RMS. This is only
slightly larger than the estimate one would make by simple RSS of the
contributing error terms: (16.8^2 + 24^2 + 35^2 + 10^2)^0.5 = 46.7 nm. The
difference is likely due to finite latency of the system when compensating
~70 Hz vibrations of the ASM RB. When run with “as-designed” measurement
errors (see Table 8-13 [TBA]), the final piston error is 32.0 nm RMS.
Fig. 5.20 Residual segment piston for the first 100 s of the simulation shown in
Figure 10-32. The high frequency error is due primarily to edge sensor
measurement error. The jumps every 10 s are due to error in the OIWFS
measurement. The piston error is 50.4 nm RMS.#