3.2. Domains of Control#
One perspective of the software architecture is based on the functional decomposition of the observatory. In this view, there are four major domains of software control, based on a clear separation of concerns: the Telescope Control System (TCS), Observatory Operations System (OPS), Observatory Services (OSRV), and Instrument Control System (ICS), as shown in the figure below. The components within each domain are partitioned in a way to facilitate modular software design. Modularity allows different components to evolve independently through the life of the project, to address new scalability needs (e.g., new hardware subsystems require higher performance telemetry), or to address different optimization strategies.
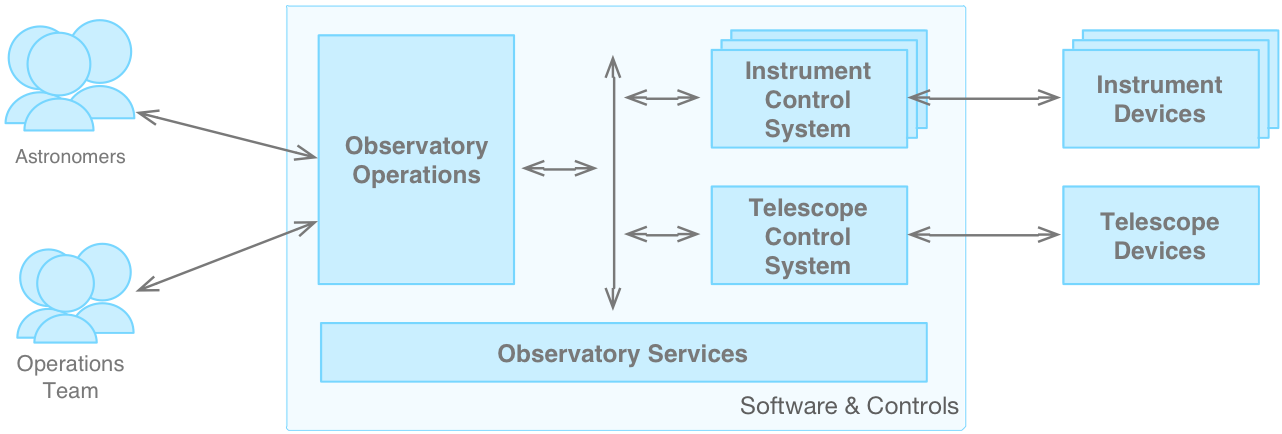
Fig. 3.2 Application Layer: Domains of Control#
In brief, the four domains and some underlying considerations are:
Telescope Control System – The TCS domain comprises subsystems that are in charge of controlling the telescope optomechanical devices. The hierarchy of the TCS architecture follows a functional decomposition or breakdown that closely mirrors the physical organization of the telescope hardware subsystem. In this scheme, Device Control Subsystems (italicized to emphasize a model component by that name in the software architecture) take care of the elementary and aggregated mechanical degrees of freedom of the telescope, whereas the Wavefront Control and Pointing Kernel Subsystems take care of the integrated behavior of the telescope. The benefit of this structure is that it is likely to be very stable once the project is baselined. While new hardware will be developed and integrated during the life of the project, the core optomechanical design will remain unchanged.
Most of the software subsystems of the TCS can be designed to share a common architecture, which is presented in Device Control Framework. Doing so facilitates the reuse of common designs among subsystems, communication among groups due to having common “vocabularies” and concepts, development of a common body of experience, and a more efficient operation and maintenance due to the commonalities shared between subsystems. It also facilitates the creation of common development tools and artifacts (files, (meta)data, schedules, code skeleton, etc.) in the process.
Observatory Operations – The OPS groups the software subsystems that provide the capabilities to support efficient operations and workflows of the observatory. This domain architecture follows a functional decomposition based on the core observatory operation workflows. As such the structure of the observatory operation subsystems more closely mirrors the different stages in the operation of an observatory: proposal preparation and planning, observation execution, final data processing, quality control, and archiving of the scientific data.
The detailed specification of workflows and tools will evolve during the project construction phase and likely also during the operations phase as the project gains better understanding of the system and identifies areas where productivity can be improved. The goal is to develop a system that remains flexible and, at the same time, that efficiently supports the operational workflows without constraining the introduction of new ones.
Observatory Services – The OSRV groups the subsystems that provide common infrastructure service components. Each observatory services subsystem (engineering user interface, logging, telemetry, configuration, etc.) addresses a specific structural function. Structural functions are systemic in nature and they provide interfaces for any component in the system (e.g., fault management, telemetry). The OSRV components allow developers to focus on writing application specific code without worrying about low-level infrastructure implementation details.
Instrument Control System – The ICS groups the software and hardware subsystems in charge of controlling instruments for science observations. In general, the ICS follows the same architectural design as other device control subsystems.