7.9. I/O Framework#
The I/O Framework (IOF) provides the infrastructure to develop observatory compliant Device Controllers based on EtherCAT technology. The Section on Field Device Interface Technology provides a more detailed description of EtherCAT. The IOF provides the following capabilities:
Tools to assist developers with the definition of their application’s I/O.
Templates that can be reused or extended based on reference definitions and implementations.
Standard environment to build, test and deploy systems.
Abstraction layers to keep underlying 3rd party software packages transparent, and hide the complexity and low-level implementation details.
Tools to assist with prototyping, testing, debugging and validation during all the steps of the development process.
Scripting capabilities and a command line interface for rapid development.
7.9.1. Terminology#
A Device is a real world, physical entity representing the system under control. A device controller is a standard software component (see the following section). The device controller relays input and output signals to control hardware devices. An IOModule is a hardware independent representation of an I/O module terminal whereas the IOModuleDriver provides the hardware dependent implementation, e.g., due to vendor specific electronics implementation. An IO module terminal is a real-world electronics component built into a hardware device assembly.
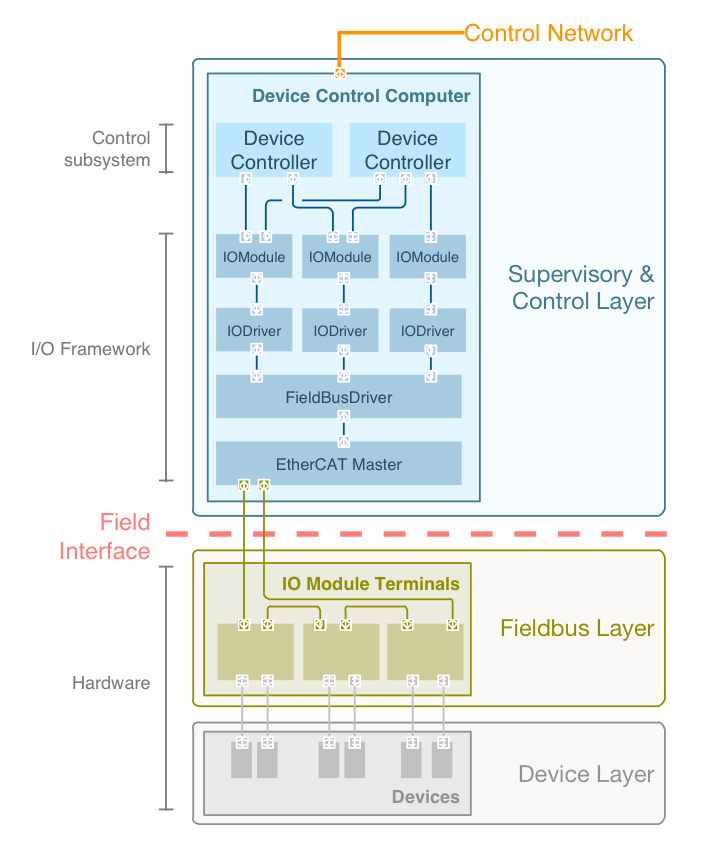
Fig. 7.8 Framework Overview#
While particular hardware assemblies may rely on highly specialized controllers (e.g., cameras, deformable mirrors) a substantial number of hardware assemblies can be identified in the telescope design that rely on a limited set of fundamental generic building blocks. These primitive I/O modules can be grouped into generic families:
Digital Input and Output modules
Analog Input and Output modules
Position Measurement modules
Motion control modules
Communication modules, e.g., Serial or Ethernet – often used to bridge more integrated systems
More specialized modules, e.g., Pulse Width signal output, Thermocouple input, etc., extend from this general classification.
The I/O Framework is decomposed into layers. A bootstrap layer handles configuration and setup of the environment using SDFs. A runtime layer provides the hooks between the bootstrapped environment and the application development environment. The framework is logically structured into a hardware abstract layer e.g., an IOModule instance of digital output family, and a hardware dependent layer, e.g., a vendor specific unit. Although the scope of the currently envisioned framework is really targeted at EtherCAT, other technology can be interfaced using the same architecture.
7.9.2. Fieldbus Communication#
EtherCAT Master
The principles of EtherCAT fieldbus communication are presented in more details in Section on Field Device Interface Technology. The EtherCAT technology group (ETG) provides an ANSI-C reference implementation for EtherCAT master. The GMT I/O Framework relies on third party software to provide this communication layer. Different commercial and open-source implementations have been evaluated [Bec12a] to find which solution better suited the needs of GMT, and to understand commonalties between different solutions.
The current baseline uses the EtherCAT Master (ECM) from IgH, an open source package from the IgH EtherLab tool suite. The IgH EtherCAT master is implemented as a Linux kernel module and provides an API to configure and operate the EtherCAT fieldbus. The API is available in user space and kernel space for development.
The IgH implementation also provides a generic network driver that will function independently of the computer network hardware, using the Linux kernel network stack. This approach proves very flexible but suitable for rates typically less than 1 kHz. Specialized drivers are also provided for a couple of popular network interface (Intel e100/e1000, Broadcom). Those bypass the network stack and allow faster and more deterministic responses, up to 5-10 kHz cycle time from our lab evaluation.
ECM Driver
The IgH EtherCAT master handles all aspects of the communication protocol and state transitions. Beyond that, it does not impose any particular philosophy or mode of operation. The GMT I/O Framework builds on top of the EtherCAT master to provide isolation from third-party specific implementations and a common pattern reused by all the GMT applications.
The ECM Driver is the main component of the I/O framework; it provides the following capabilities:
Interfaces with the EtherCAT master implementation and exposes a predefined operation pattern.
Exposes status information via the sysfs file system.
Exposes an API to configure the application process maps and I/O modules. The interface is available from both user-space using ioctl and kernel space.
Exposes a top level r/w debug level flag accessible through procfs
Holds the field bus configuration in terms of I/O module terminals topology and configuration.
The EtherCAT fieldbus communication follows a master/slaves paradigm. The fieldbus is daisy chained and the protocol uses a simple addressing mechanism based on each slave (i.e., I/O module terminal) position on the bus. The ECM Driver component holds a list of IOModules to represent this arrangement. IOModules are described in next section.
7.9.3. I/O Module Terminals#
EtherCAT Slaves
EtherCAT Slave Controllers (ESC) provide an EtherCAT Slave Information file (ESI), an I/O module terminal description document in XML format. Information about the module functionality and settings is provided by the ESI. Slave specific information (manufacturer, product information, profile, object, process data, sync or non-sync, sync manager setting) is registered to the ESI file in XML format.
ESI files are used by the I/O Framework to define the application network information (ENI) e.g., process data structures and initialization commands. The ESI file is defined by the ETG.2000 EtherCAT Slave Information specification. The structure of an ESI file is defined in the EtherCATInfo.xsd XML schema document, available from ETG.2001 EtherCAT Slave Information annotations.
ECG I/O Modules
An IOModule is a base component from the I/O framework used to represent an EtherCAT slave controller. I/O Module terminals are fully resolved by their vendor identifier, product code, and revision number. The ETG group assigns EtherCAT technology partners and vendors unique vendor identifiers. The I/O framework provides tools to automatically generate IOModule components from the slaves ESI definition. The components follow a naming convention for convenience.
IOModules are registered to the ECM Driver using this naming convention and their location on the fieldbus. They expose Process Data Object (PDO) as block of memory. The I/O framework generates a mapping of the PDO map to different target programing languages, currently C/C++ and Python.
The following code blocks below together show an example of an I/O Module PDO Mapping in C/C++ and Python:
struct bh_el7041_00130000_sm3 { uint8_t x1a01_6000_01 :1; // (ro) ENC Status - Status__Latch C valid uint8_t x1a01_6000_02 :1; // (ro) ENC Status - Status__Latch extern valid uint8_t x1a01_6000_03 :1; // (ro) ENC Status - Status__Set counter done uint8_t x1a01_6000_04 :1; // (ro) ENC Status - Status__Counter underflow uint8_t x1a01_6000_05 :1; // (ro) ENC Status - Status__Counter overflow uint8_t :2; uint8_t x1a01_6000_08 :1; // (ro) ENC Status - Status__Extrapolation stall uint8_t x1a01_6000_09 :1; // (ro) ENC Status - Status__Status of input A ... uint32_t x1a06_6020_11; // (ro) POS Status - Actual position int16_t x1a06_6020_21; // (ro) POS Status - Actual velocity uint32_t x1a06_6020_22; // (ro) POS Status - Actual drive time } __attribute__ ((packed));class bh_el7041_00130000_sm3 (Structure) : _pack_ = 1 _fields_ = [ ('x1a01_6000_01', c_uint8, 1), # (ro) ENC Status - Status__Latch C valid ('x1a01_6000_02', c_uint8, 1), # (ro) ENC Status - Status__Latch extern valid ('x1a01_6000_03', c_uint8, 1), # (ro) ENC Status - Status__Set counter done ('x1a01_6000_04', c_uint8, 1), # (ro) ENC Status - Status__Counter underflow ('x1a01_6000_05', c_uint8, 1), # (ro) ENC Status - Status__Counter overflow ('_________pad0', c_uint8, 2), ('x1a01_6000_08', c_uint8, 1), # (ro) ENC Status - Status__Extrapolation stall ('x1a01_6000_09', c_uint8, 1), # (ro) ENC Status - Status__Status of input A ... ('x1a06_6020_11', c_uint32), # (ro) POS Status - Actual position ('x1a06_6020_21', c_int16), # (ro) POS Status - Actual velocity ('x1a06_6020_22', c_uint32), # (ro) POS Status - Actual drive time ]
Once registered to the ECM Driver, each IOModule instance exposes status information and its PDO mapping via the sysfs file system.
The Table below shows an ECG I/O Module sysfs (EL7041 at position 10):
sysfs |
Type |
Description |
|---|---|---|
iom/dev10_EL7041/al_state |
int |
Application Layer state 0:INIT, 1:PREOP, 2:SAFEOP, 3:OP) |
iom/dev10_EL7041online |
int |
IO Module online state |
iom/dev10_EL7041operational |
int |
IO Module operational flag |
iom/dev10_EL7041/1a01_6000_01 |
bit |
(ro) ENC Status – Status Latch C valid |
iom/dev10_EL7041/1a01_6000_02 |
bit |
(ro) ENC Status – Status Latch extern valid |
7.9.4. Process Image#
EtherCAT Frames
The ECM Driver handles the registration of all the IOModules and their mapping into EtherCAT frames. EtherCAT frames are cyclically sent and received by the master at the base frame rate defined by a “freq” parameter. The I/O framework allows mapping of certain regions of the I/O modules at multiple of the base rate, i.e., those PDO only update every n-th frames of the nominal rate. The complete process image contained in the EtherCAT frame can be thus split into separate logical regions.
ECM Domains
An ECM Domain is a base component of the I/O framework used to represent a sub region of an EtherCAT frame updating at a given rate. The rate is a fraction of the nominal rate and currently supports power of two values, i.e., x1, x2, x4, … x128. During system initialization, ECM Domains are initially defined and IOModules register their PDO mapping into those domains.
In its simplest form, an application may simply consist of a unique domain, which will be used by all the modules and contains the complete process image that updates at the nominal (x1) base rate. Once registered to the ECG Master, each ECG Domain instance exposes status information and its fraction of the process image via the sysfs file system.
The Table below shows an example of the Process Map sysfs:
sysfs |
Type |
Description |
|---|---|---|
pmap/dom00/data |
bytes[] |
Domain process image memory map (mmap) |
pmap/dom00/domain_size |
int |
Number of bytes in data |
pmap/dom00/wc_state |
int |
Working counter state (0: complete, 1: incomplete) |
pmap/dom00/working_counter |
int |
Working counter value |
7.9.5. Bootstrap Process#
The framework provides all the capability to configure and bootstrap a new application. The process can be done programmatically at different level: kernel, user-space C/C++, python – in decreasing order of complexity.
The framework provides an API to configure Service Data Objects (SDO) and Distributed Clock (DC) settings for each IO Module. Details are not presented here but essentially consist of straightforward ioctl binding as listed in the previous section. The resulting API provides seamless integration with the GMT modeling framework and fosters the automatic generation of bootstrap components based on model application definitions. Once bootstrapped, the I/O framework cyclically runs the complete EtherCAT stack.
The code (Python) below shows an example of an Application Bootstrap:
from gmt import ecx from gmt.ecx import nth, acc # acquire master m = ecx.master(0) # register domains dinp = m.domain_register(0, nth.x1, acc.ro) dout = m.domain_register(1, nth.x1, acc.wo) # register devices m.device_register('bh_ek1100_00110000', 0) m.device_register('bh_el2202_00100000', 1) m.device_register('km_akd_00000002', 2, inp = dinp, out=dout) # activate @ 1 kHz m.activate(1000)
7.9.6. Runtime Components#
The I/O framework provides additional runtime components to interface with the bootstrapped application.
ECM Fieldbus
The ECM Fieldbus component is a front end to the kernel spaces components. In particular, ECM:
Runs the EtherCAT stack cyclically, taking over from the free-wheeling ECM Driver.
Checks health of the different kernel components, e.g., ECM Driver link up, slaves responding, I/OModule’s al_state, ECG domain’s working_counter, etc. and raises appropriate alarms.
Arbitrates access to the process maps in between cycle.
ECM I/O Drivers
ECM I/O Drivers provide reference implementations for the control of their I/O Modules. The I/O drivers interact with the ECM Driver to access the I/O module process maps in a synchronized way. I/O Drivers can be very simple, e.g., a digital output driver that only needs to set a bit in the I/O module process map, or more involved, e.g., implement CiA402 motion profile state machine.
The ECG I/O Drivers essentially allow hiding the low level details of control, and enforcing data synchronization when accessing the fieldbus.
BaseDeviceController
The BaseDeviceController component is part of the Device Control Framework and provides a base implementation for all GMT components implementing a Device Controller. The components provide:
An environment holding the IOModules, IODrivers and Fieldbus instances, and access to those components.
Adapters to Observatory Services, e.g., logging, telemetry, alarms, etc..
Adapters to middleware to expose commands, process data, etc. to the rest of the control system.
The framework provides an API for developers to build their own application, and python binding for rapid prototyping, testing, and validation.
The code (Python) below shows an example of an Application Runtime:
from gmt import ecx # load application app = ecx.load('demo') # lookup component km = app.lkup('demo://dev/km_akd') # device control def when_done(status): pass km.init() km.datum() km.move(42, when_done)