8.3. Time Distribution System#
While individual subsystems often provide their own internal clock(s), quality and accuracy of (crystals) varies vastly between systems. A time distribution system allows a heterogeneous set of controllers to reference and to synchronize to the same master clock, and to share the same notional measure of time within a distributed framework. Time systems are commonly layered into strata, referring to how far each clock is located from the reference clock. For telescope applications, a GPS clock (stratum 1) heads the hierarchy and acts as the grand master clock.
A time system is particularly relevant for the GMT Telescope where time synchronization plays an important role in many areas. In calculating a telescope slew trajectory, for example, the telescope kernel pointing coordinates must be computed using the GPS time; or for calculating continuous drive demands, where it is necessary to interpolate between time stamps; or for telemetry case, where uniform timestamps must be used to correlate real-time and archive data.
Requirement |
Statement |
|---|---|
Synchronization Time Budget |
Provide the capability to coordinate the operations of subsystems during operations to within time budgets allotted by the SLR. |
Time Reference |
Provide the capability to obtain and distribute a time reference accurate to 1ms (TBR). |
8.3.1. Time Distribution Protocols#
The most popular time distribution protocols are the Network Time Protocol (NTP), the Inter-range Instrumentation Group code B (IRIG-B) and the Precision Time Protocol (PTP). Their main characteristics are described in the following list:
NTP is the de-facto standard for computer clusters. NTP assets include: platform independence, availability on all operating systems, and simple deployment relying on ubiquitous Ethernet connection. NTP precision is limited by unaccounted network transmission delays, and susceptibility to changes in the network topology.
IRIG-B is commonly used by 8-10m class telescopes and other major experimental physics control systems. More accurate synchronization is achieved in this case using a dedicated hardware clock and connection. IRIG-B effectively builds a time bus concept that features specialized components (hardware, software drivers, etc.) making it somewhat cumbersome and often time-consuming to implement, adding extra burden to the deployment (dedicated networks of coaxial cables are needed) and increasing the implementation cost (specialized hardware for all sub-systems is required).
PTP emerged more recently in the distributed cluster world. It addresses deficiencies of NTP, offering more accurate timestamps (thanks to synchronization packets) and accounting for transmission delays in the network. The second revision of the protocol achieves further accuracy by using specialized network interface cards (NICs) and transparent clocks. The NICs can provide hardware timestamp, so the nearer to the hardware the timestamps are generated the higher the precision.
The main features of the relevant time protocols are summarized in the Table below:
Protocol |
Sync. Accuracy |
Interconnect |
Properties |
|---|---|---|---|
NTP |
~ 2 ms |
LAN/WAN |
Subject to network delays, affected by topology changes |
Protocol |
Sync. Accuracy |
Interconnect |
Properties |
IRIG-B |
1-10 us |
Coaxial |
Needs dedicated hardware and software drivers |
PTP |
5-50 us (software) |
LAN |
Measure and compensate transmission delays |
< 1 us (hardware) |
Better accuracy using dedicated NICs and switches |
8.3.2. Precision Time Protocol#
A growing number of industrial and power utility tasks require the use of time-synchronized networks. Traditionally, timing information was distributed via a dedicated network separate from the main application, such as real-time distribution protocols, of which IRIG-B is perhaps the best known. More recently, the market has shifted to a single converged data and distributed timing network based on standard Ethernet running IEEE1588 Precision Time Protocol as part of the application layer. The protocol can achieve sub-microsecond synchronization performance over distributed networks. The IEEE15888 Standard is currently in its 2nd revision.
8.3.3. PTP Software Stacks for Linux#
Several open source (e.g., ptpd-2, ptppd-phc) and commercial (e.g., IXXAT, FSMLabs) software stacks are available for Linux, including network drivers with hardware timestamp (e.g., Blackfin on-chip Ethernet MAC driver, Intel Gigabit Ethernet Network Driver). Refer to the report IEEE- 1588 PTP Evaluation [Bec12d] for a detailed list and analysis on the software stacks for Linux.
8.3.4. Lab Evaluation#
Several PTP topologies to measure synchronization accuracy have been tested at the GMT lab67. A common arrangement is shown in Figure below:
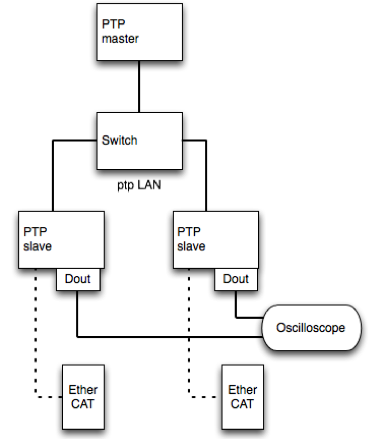
Fig. 8.7 PTP Master with 2 Slaves Arrangement using a Switched Network and a Dedicated NIC.#
Two slave computers were synchronized with PTP and each was generating a digital pulse over the serial communications port at 10 Hz. The test was carried out over a private LAN using one dedicated NIC isolated from the intranet and another NIC that was running the EtherCAT master in the background. The daemon used for the test was the ptpd-2 open source stack.
Synchronization accuracy was measured with an oscilloscope, capturing the delay and variation between the two independently generated pulses as shown in the Figure below. Over one million samples – which at 10 pulses per second translates roughly into 27 hours – the standard deviation is less than 2.5us and representative of PTP stability. The min/max outliers amplitude at < 25us falls within the technology accepted published figures.
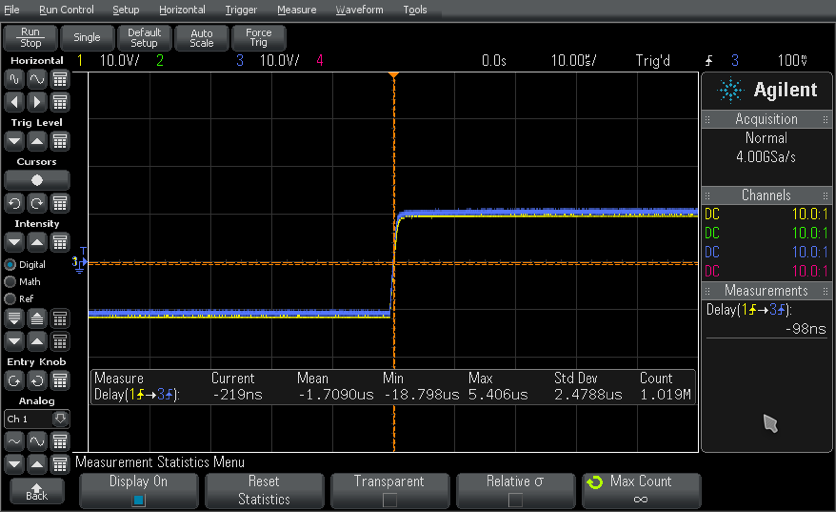
Fig. 8.8 Lab PTP Synchronization Accuracy Tests#
During the tests a couple of disturbances were introduced to evaluate the synchronization robustness. First some network traffic was initiated, essentially copying the entire file system from the master machine to an external computer outside the PTP LAN (directing the traffic to the general LAN). The accuracy in this case did not seem to be affected. Next, the machine was artificially loaded at lower priority, leaving the non-isolated CPU with 100% effective load. No evident effect on timing accuracy was observed.
A summary with all the measured quantities using a ptpd-2 implementation of the Linux PTP Software Stack is presented in the following Table:
Statistic |
Value |
|---|---|
Samples (pulses) |
> 1 million |
Mean offset |
1.70 us |
Standard deviation |
2.48 us |
Min/Max amplitude |
24 us |
The PTP network tested before was reconfigured to work over the common LAN, using now the same NIC for PTP synchronization and general networking. The table below shows the statistics obtained over the common LAN case, and as expected, the performance is slightly worse (about 60%) than using a dedicated LAN.
Statistic |
Value |
|---|---|
Samples (pulses) |
278 k |
Mean offset |
5.60 us |
Standard deviation |
4.21 us |
Min/Max amplitude |
35.4 us |
For optimal performance with EtherCAT, a patched driver for the fieldbus enabled NIC was used. During the tests, some interactions between the PTP daemon and the driver were observed, right when the EtherCAT master was started and the patched driver for the NIC got loaded. The issue can be addressed by sequencing the access to the NIC, for example by stopping the PTP daemon while EtherCAT initializes and then running it again after EtherCAT has started.
In summary, PTP has several advantages for time distribution and synchronization in a widely distributed system as GMT:
Easy and inexpensive to implement using a LAN infrastructure
Common and proven technology
Guaranteed long time support
However, a pure software solution may not be enough for a system requiring very high timing resolution stability. The numbers collected during these tests are consistent with the literature and leave no reason to doubt hardware solutions could bring sub-microsecond accuracy. For the GMT Telescope Control, a more detailed system analysis should be carried out if 5-50 microsecond accuracy is necessary.