5.4. Pointing Kernel#
The telescope pointing kernel (Figure below) is the subsystem that performs essential services to point the telescope to a desired sky location, to track the sky rotation, and to provide fine guiding on a target. The outputs of the pointing kernel are mechanical encoder values that are used to command repositioning of the mount and the instrument rotator (blue boxes in Figure below). The GMT pointing kernel is built on the TCSpk [Wall12a], tpk [Terr06], and SLALIB [Wall12b], packages developed by TPoint Software. The pointing kernel:
Predicts the mount encoder angles required to image a specific coordinate on the sky to a given location in the focal plane
Provides accurate mapping of the World Coordinate System (WCS). For example to enable mapping of celestial coordinates onto locations in the focal-plane, and vice versa, using SLALIB [Wall12b] to account for atmospheric refraction, pressure, temperature, Earth’s precession, nutation, light deflection, etc.
Enables telescope tracking and autoguiding
Allows rapid repositioning of the telescope to transfer an imaging field from one focal plane (e.g., an acquisition device) onto another (e.g., instrument detector), thereby enabling fast dithering and precise blind positioning onto slits and fibers
Allows multiple coordinate systems to be active at the same time allowing, for example, tracking of a planet while guiding on a star
Handles autoguiding in an integrated way, with differential refraction and atmospheric dispersion being taken care of at a system level
These features will be available in all natural seeing and AO observing modes.
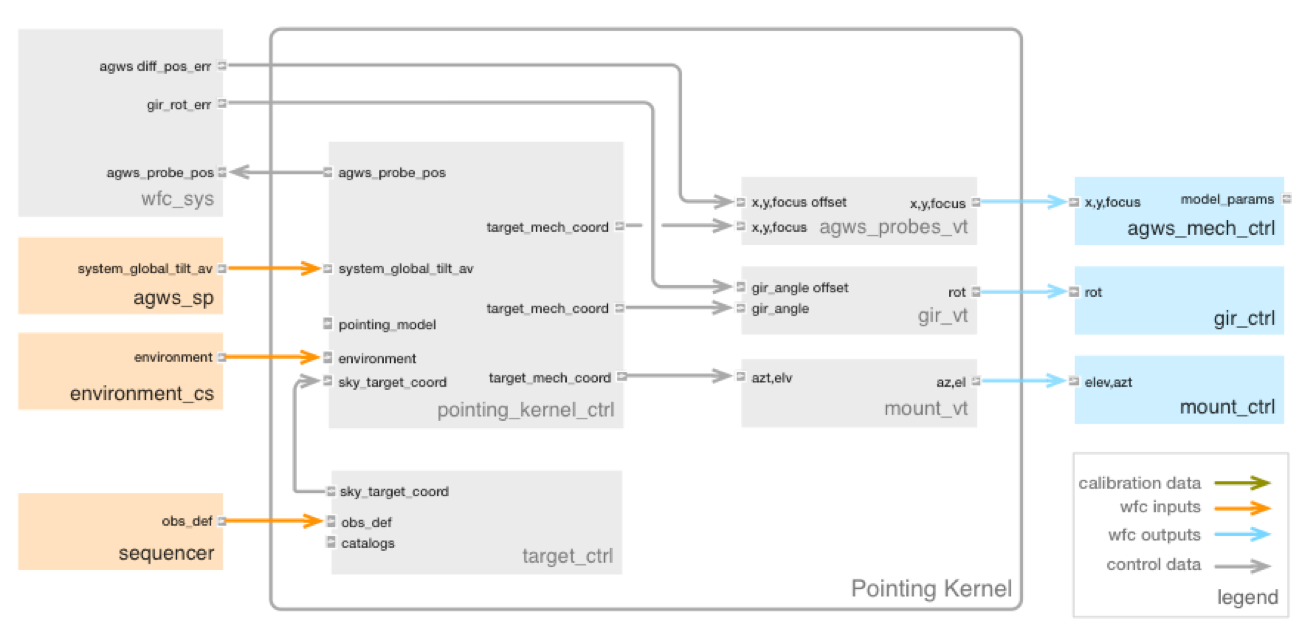
Fig. 5.2 Telescope Pointing Kernel#
The telescope pointing kernel is composed of three primary components: Target Server, Supervisor, and Virtual Telescopes. The functions of each component are briefly described:
Target Server (pk_target_server) – The Target Server is the high level server telling the telescope where in the sky or at which targets to aim. It possesses high-level knowledge about the science program being observed, i.e., the science targets, the guide stars needed to perform an observation, and the desired pointing location on an instrument. The server takes as inputs an observing definition (e.g., observing templates produced from the Phase 2 proposal) and object catalogs, and produces a set of coordinates to send to the pointing kernel supervisor for implementation. For telescope dithering, the target server receives and interprets the dithering strategy to provide coordinates to reposition the telescope.
Supervisor (pk_supervisor) – Most components (e.g., subsystems and devices) involved in telescope pointing, tracking, and guiding, merely act on the data and instructions provided to them without regard to the overall purpose. However if, for example, the WFCS fails to acquire a guide star, or a guide star moves outside the guide field (for guiding on a non-sidereal target) a supervisor must decide on a corrective course of action. The pointing kernel supervisor provides the intelligence to decide what actions to take in the event of success or failure in acquisition and guiding. In addition, the pointing kernel supervisor implements the pointing model; maintains the context for slow, medium and fast guiding and tracking calculations; and manages which virtual telescopes are active at any given time.
Virtual Telescopes (vt) – A central concept in TCSpk is the “Virtual Telescope”, which takes as input a desired coordinate and performs the detailed transformations necessary to make accurate telescope pointing a transparent process. As viewed from the perspective of end-users and software control interfaces, the virtual telescope therefore appears like a perfect telescope. The virtual telescope relates three pieces of information necessary to position the telescope: the mount directional pointing [Az, El], the location of an image in an instrument focal plane [x, y], and the celestial coordinate of a target [α, δ]. Knowing two out of the three quantities, the virtual telescope can predict the third. The virtual telescope enables one to position a target fixed at any location and orientation on an instrument, accounting for the rotator angle. There is at least one virtual telescope assigned to each focal station that has an instrument. Each instrument can have multiple virtual telescopes that have different pointing origins to allow fast dithering, accurate positioning of a target onto a slit or fiber aperture, and other purposes. The virtual telescope generates mechanical demands to the mount encoders to reposition the telescope.